我國學者墨子和他的學生,做了世界上第一個小孔成倒像的實驗,解釋了小孔成倒像的原因,指出了光沿直線進行的性質。2000多年后的今天,機器視覺技術變得越來越復雜,工業領域的圖像處理更多的專注于3D傳感器,而且越來越多的技術已經完善并且投入到實際應用中,包括焊縫的檢測,以及在生產過程中對未分類部件進行倉揀或精確測量金屬板。可以說,機器視覺已經轉向了3D成像。
GGII數據顯示,2019年中國機器視覺市場規模65.50億元(該數據未包含計算機視覺市場規模),同比增長21.77%。2014-2019年復合增長率為28.36%。GGII預測,到2023年中國機器視覺市場規模將達到155.6億元。

機器視覺典型應用
機器視覺,或者說計算機分析和預測圖像內容的能力,通常只取決于輸入的圖像的好壞。這就是為什么工程師們一直孜孜不倦地從硬件和軟件的角度創造出新的、更好的三維成像技術手段的原因。
什么是3D成像?
在研究成像時,工程師可以從人眼捕獲和解釋圖像的方式中找到靈感。
一種視差模擬相機的工作原理
人類視覺系統的工作方式是,每只眼睛從不同的角度觀看世界,并通過稱為視差的過程將這些圖像合并為一個圖像。3D成像采用相同的方法,每次拍攝都使用兩個鏡頭,每個鏡頭拍攝的圖像彼此都不相同。
主動與被動3D成像
3D成像技術按照工作原理,首先分為被動式和主動式兩類。
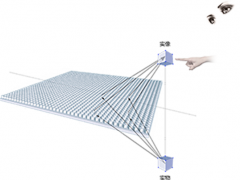
被動式視覺效仿生物的雙眼視覺(binocular vision)原理,由至少2枚圖像傳感器(image sensor)構成,運用其觀測對象在每個圖像傳感器單獨成像的位置,結合2枚圖像傳感器的相對物理位置,根據幾何關系測量原理,可以計算出景深(depth),如下圖所示。
雙目視覺系統的核心在于關聯同一觀測點在各自圖像傳感器中的坐標位置,如上圖的左圖所示。然而,在實際使用中,由于受到外部環境和拍攝對象表面紋理屬性等客觀因素影響,特征點自動匹配在算法上較為復雜,匹配精度也直接影響到景深計算精度,影響系統整體效果。
主動式視覺系統則由于其工作原理的不同,有效解決了這一問題。
主動式視覺系統利用獨立的人工光源,主動投射到觀測對象來測量景深。主動式視覺根據投射光源和景深技術原理的不同,又分為三小類:三角測距法、結構光法、飛行時間法。如下圖所示。下面做詳細介紹:
主動視覺系統分類
(1)三角測距法(triangular)
三角測距法是利用投射光源、觀測對象和接收圖像傳感器的空間位置,利用三角幾何學計算景深的方法。此方法是眾多主動式3D景深視覺系統的底層基礎算法。
(2)結構光法(structured light)
結構光法可以認為是針對在被動式視覺系統中特征點匹配問題的對策性方案。如下圖所示,結構光的含義是主動光源通過特定圖案編碼投射到被測物體,例如將分布較密集的均勻光柵投影到被測物體上面,由于被測物體表面的不規則性具有的不同深度,反射到圖像傳感器的光柵條紋會有所變形,這個過程可以看作是由物體表面的深度信息對光柵的條紋進行了調制。通過對比圖像傳感器接收到的發生畸變的光柵圖案和原生圖案,就可以解析出每個觀測點的深度信息,形成深度點云(point cloud),即深度幀(depth frame)。
結構光景深成像原理示意圖
(3)飛行時間法(time of flight)
飛行時間又稱TOF,簡要來說,是基于測量投射的光源信號發射與接收之間的時間差,計算出景深或距離的一種景深計算方法。
TOF根據如何測量時間差又可細分為脈沖波測距和連續波測距。脈沖波測距原理是直接測量脈沖信號發射和接收的時間差;連續波測距則是通過連續發射整數波長,通過計算接收波與發射波之間的相位差,間接計算時間差,如下圖所示。
TOF景深成像原理示意圖
3D成像應用
許多領域可以極大地受益于3D成像。
目前比較熱門的應用就是自動駕駛汽車。隨著3D成像技術的改進,自動駕駛汽車的視覺系統將會更好,讓它們實時做出更準確、更安全的決策。另外增強現實也是將受益于3D成像應用。
除了機器視覺,醫學領域尤其可以看到許多值得注意的應用,3D成像在超聲、心臟探查和外科視覺等領域的應用將極大地造福于醫生和患者。
視覺引導脊柱外科手術
3D成像是已成為科技領域熱門領域之一,隨著技術在電路層面的不斷完善,很多領域都可能將3D成像確立為一項司空見慣的技術。